
7. Dez. 2016: Zum offiziellen Projektauftakt am 6. Dez. hatten die Partner im ECHORD++ EXPERIMENT CATCH auch Vertreter aus Produktion und der verarbeitenden Industrie zu einem Workshop am ATB eingeladen. Ziel des Projekts CATCH ist die Entwicklung einer flexiblen und kosteneffizienten Lösung für die automatisierte Ernte von Einlegegurken im Freiland.
Einlegegurken werden in Deutschland bislang von Hand geerntet, meist mit Hilfe von Gurkenfliegern. Die aufwändige Handarbeit macht die Ernte sehr kostenintensiv. Ohne verbesserte Erntetechnologien ist davon auszugehen, dass die Produktion von Einlegegurken in Deutschland bald kaum mehr wirtschaftlich sein wird.
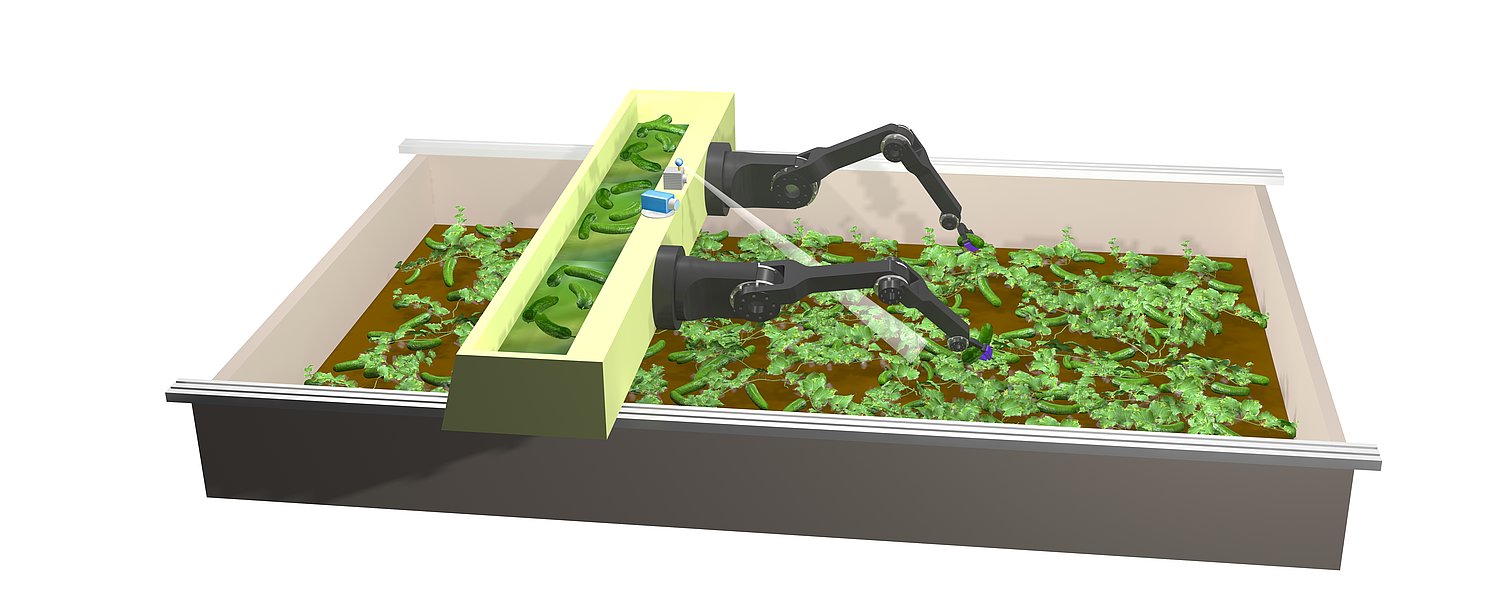
Forscher im Projekt CATCH haben sich daher zum Ziel gesetzt, ein aus Leichtmodulen aufgebautes kostengünstiges Mehrarm-Robotersystem zu entwickeln und zu testen, das für die automatisierte Gurkenernte, aber auch für andere landwirtschaftliche Anwendungen nutzbar sein soll. Nach Vorstellungen der Forscher soll in Zukunft ein autonomer Ernteroboter bei Wind und Wetter über das Feld fahren, erntereife Gurken erkennen und diese dann mit Hilfe seiner beiden Greifarme schonend pflücken und ablegen.
Partner im Projekt CATCH sind das koordinierende Fraunhofer Institut für Produktionsanlagen und Konstruktionstechnik Berlin (Fraunhofer IPK), das CSIC-UPM Centre for Automation and Robotics, Spanien, und das Leibniz-Institut für Agrartechnik und Bioökonomie (ATB).
Die Arbeiten am ATB konzentrieren sich auf die Testung der Technik im Feld und die Produktqualität der maschinell geernteten Einlegegurken. Bereits von Juli bis September 2016 wurden am ATB-Forschungsstandort Marquardt in Potsdams Nordwesten erste Feldversuche durchgeführt und die Qualität der per Hand geernteten Einlegegurken analysiert. „Um die Wirkung der mechanischen Ernte durch die Roboter auf die Gurkenqualität bestimmen zu können, brauchen wir belastbare Vorher-Nachher-Vergleichswerte, insbesondere zu Elastizität und Festigkeit der Ernteprodukte“, so Jelena Surdilovic, die die Arbeiten am ATB koordiniert. Zudem untersuchten die ATB-Wissenschaftler gemeinsam mit Kollegen vom Fraunhofer IPK per Videoanalyse die Bewegungsabläufe bei der manuellen Ernte. Die Erkenntnisse zu den einzelnen Bewegungselementen wie das Suchen mit zwei Händen und das Greifen sind wichtig für die Entwicklung der Roboterprogrammierung.
Die Erwartungen an das neuartige Erntesystem sind hoch: Es soll leicht sein und dabei robust genug, um auch bei ungünstigen Witterungsverhältnissen im Freiland einsetzbar sein. Zudem muss das automatisierte System mindestens so effizient und leistungsstark sein wie die manuelle Ernte. „Die Ernte von mindestens 13 Gurken pro Minute ist unser Ziel“, beschreibt Jelena Surdilovic die Erwartungen an die Technik. „Wichtig ist, dass die Qualität der Gurken nicht leidet. Und das System muss natürlich wirtschaftlich sein, damit es von der Praxis angenommen wird.“
„Das Thema brennt, es muss eine Lösung in naher Zukunft gefunden werden, denn der Gurkenanbau geht extrem zurück“, fasst Heinz Peter Frehn vom Gurkenhof Frehn im Spreewald die Erwartungen der Anbauer zusammen. In den Hauptanbaugebieten Niederbayern und Spreewald wird bereits über den Anbau alternativer Kulturen nachgedacht.
Das ATB hat im Verbund mit Landwirten und Verarbeitungsindustrie bereits an der Entwicklung eines Gurken-Vollernters mitgewirkt (ELER-gefördertes Projekt „Praxisrelevante Lösungen durch maschinelle Ernteverfahren im Freilandgurkenanbau unter den Bedingungen Südbrandenburgs“, abgeschlossen 2013). Die vollmechanische Ernte hatte jedoch entscheidende Nachteile: Sie machte mehrmaliges Durchpflücken unmöglich, da die Pflanzen durch den Vollernter aus dem Boden gezogen wurden, und sie beeinträchtigte zudem die Qualität. „Diese Nachteile können wir mit dem aktuellen Ansatz einer intelligenten automatisierten Gurkenernte vermeiden“, ist Jelena Surdilovic überzeugt.
In der Saison 2017 soll der Ernteroboter in Marquardt getested werden.
Das Projekt Cucumber Gathering – Green Field Experiments CATCH (echord.eu/catch/) wird im Rahmen von ECHORD++ EXPERIMENT aus Mitteln der EU gefördert. ECHORD zielt auf die Einführung von Robotiktechnologien in die Industrie. Die Forschung erfolgt in Konsortien aus Wissenschaft und Industrie. ECHORD ++ finanziert kleinere, auf die Praxis ausgerichtete Forschungsprojekte mit einer Höchstdauer von 18 Monaten.
Weitere Informationen zum Projekt unter http://catch-echord.blogspot.de/
Kontakt ATB:
Helene Foltan – Presse- und Öffentlichkeitsarbeit
Jelena Surdilovic – Wissenschaftlerin im Projekt CATCH